
3月26日,首届中国功能型无人车技术与行业发展论坛顺利召开。中国工程院院士、北京理工大学常务副书记项昌乐院士作了题为《智能陆空车辆技术及发展》的主旨演讲。以下为项昌乐院士的报告原文:目前,智能汽车进入了快速发展的时代,世界各国都在大力发展智能汽车。在未来智能交通或智慧城市中用以完成不同功能型任务的车辆,都可以定义为功能型无人车。这次会议的召开,对功能型无人车技术进步和行业发展,有重要的推动作用。下面,我结合我们在相关领域多年的研究基础,为大家报告一下智能陆空车辆的关键技术与发展趋势。

随着城镇化的进程不断推进,交通拥堵已经成为了我们生活中必须面对的难题。这不只是北京等特大城市才有的问题,几乎所有城市都有交通拥堵的情况发生。设想一下,如果我们在早高峰的时候,在这样的环境中驾驶车辆,又要急于赶到公司做重要的决策,是多么着急的心情。在这个时候,我们会幻想着汽车能够飞起来,具有垂直起降的能力。
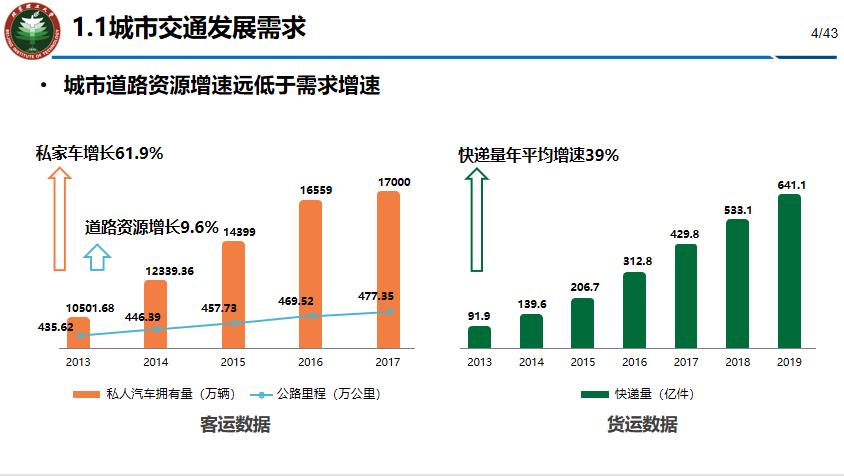
随着城市建设的快速发展,城市交通资源和车辆发展的矛盾日趋激烈。无论是在客运还是货运方面,其体量都在逐年迅速增加。
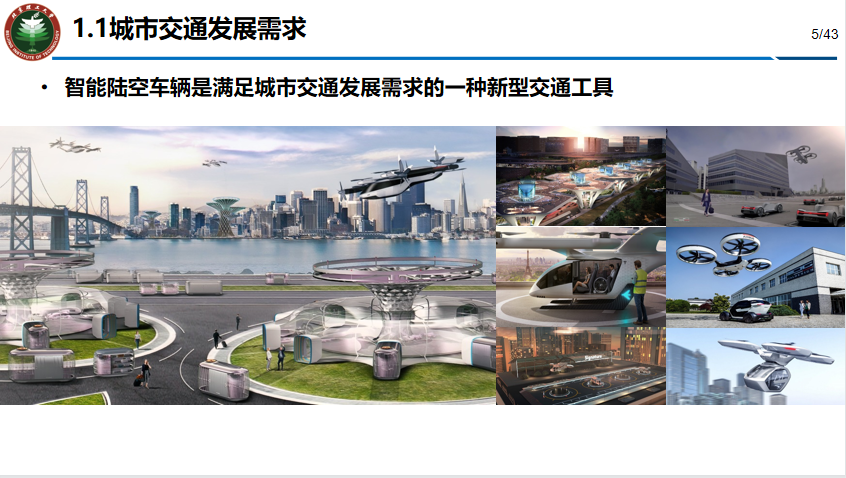
随着城市进程不断发展,交通拥堵情况也就愈发恶劣,那么,拓展交通资源就成为了迫切需求。空地一体化的交通理念是未来的发展趋势,也就是说,我们要拓展近空领域的交通资源。地面过于拥挤,我们就要发展低空交通。就好比地球资源不断匮乏,我们就要拓展探索其他星球。所以,空地一体化的智能陆空车辆就是解决未来城市交通拥挤的新兴交通工具。
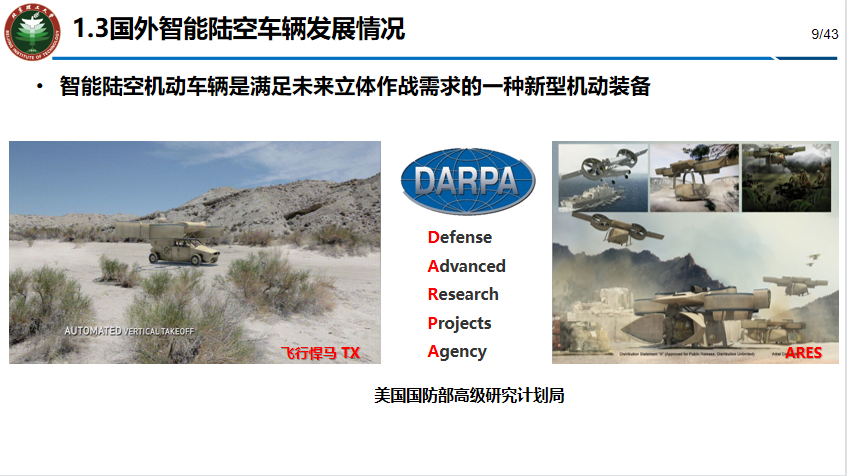
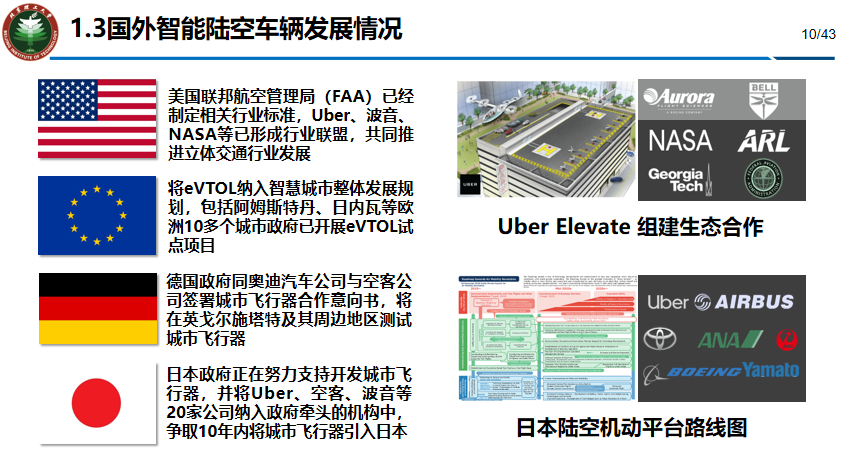


近年来,国际上在这方面的研发进展非常迅速。美国国防部高级研究计划局在几年前就开始提出陆空车辆的概念,他们发展了几种形式并不断在迭代,从最早的陆空车辆基础构型,到后面又不断创新了很多新形态构型。美国、欧盟、德国、日本等都在军民用领域制定了系列陆空车辆、陆空飞行器的发展战略,飞行器的形态也在从从飞行逐步向陆空多功能转变。在另一方面,近几年智能陆空车辆也得到了社会资本以及大型集团企业的持续关注和注资。


我国工信部、科技部等部委都制定了相关的支持计划,行业内的相关企业以及高校等也针对智能陆空车辆开展了广泛的研究。这里所展示的是世界各个国家针对陆空车辆的设计方案,粗略估计已经超过了200多种。这也从另一个角度说明,目前在起步创新的阶段中,智能陆空车辆的发展并没有固定的模式和路线,各国都在积极的探索,针对不同的场景或者不同的需要,都有不同构型方案的出现。
综上来讲,智能陆空车辆的研究是具有重大意义的。在民用方面,拓展城市交通维度,解决城市拥堵问题,提高城市交通效率,让人民过上更幸福的生活。在军用方面,可以提高城市作战能力,服务于国防安全。那么,智能陆空车辆的研究对我国国民经济发展和国防安全建设都有着重要意义。

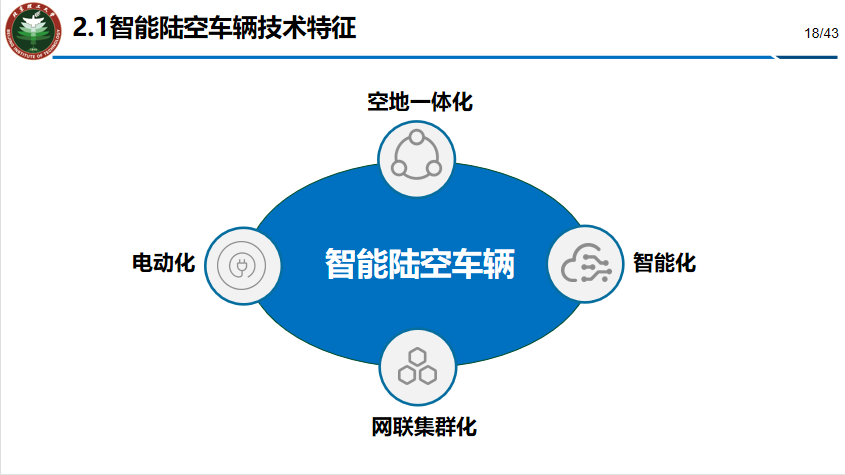

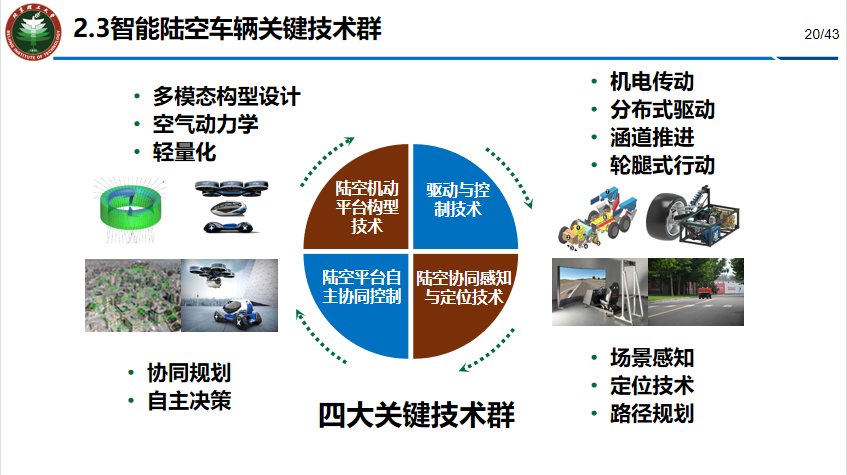
第二,智能陆空车辆发展所面临的关键问题。智能陆空车辆技术特征包括空地一体化、电动化、智能化、网联集群化。存在的技术难题和挑战有六个方面:一是垂直起降困难,因为城市里气流环境、地貌环境复杂。二是稳定控制困难,高楼群里面气流环绕而且会造成飞行不稳定。三是低噪驱动困难,飞行器噪音比较大,会对周围居民产生较大影响。四是智能管控困难,五是集群调度困难,六是智能导航困难。为了解决这些问题,其关键技术群就包括陆空机动平台构型技术、驱动与控制技术、自主协同控制技术、协同感知与定位技术四大关键技术群。

下面,为大家报告一下智能陆空车辆的研发技术进展,以及我们所做的一些工作。这是我们目前承担的国家重点研发计划中的一个内容,子母式地震灾后救援装备。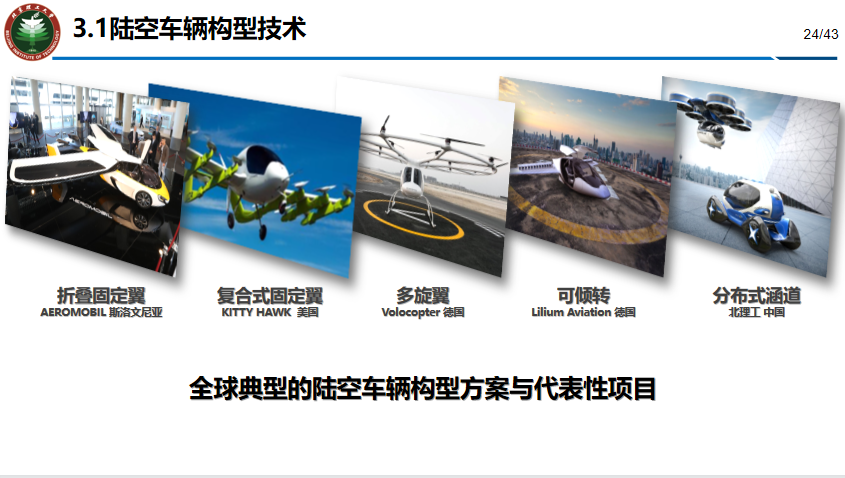
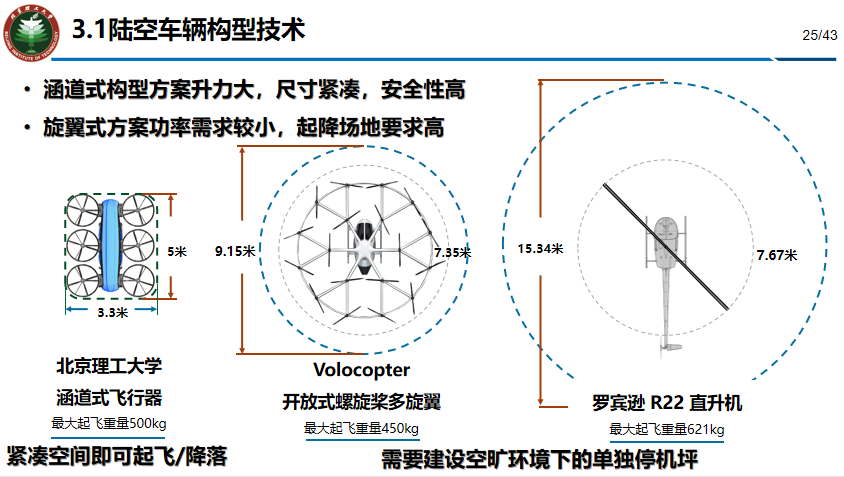
在构型技术发展方面,目前200多种构型归纳起来一共有这样五种典型形式,每种形式有各有的特点。涵道式构型方案升力大,尺寸紧凑,安全性高,能够近体贴近复杂障碍物,相当重量下占用的体积小。开放式螺旋桨多旋翼方案功率需要较小,但起降场地要求高,由于其价格便宜、成本低、工艺难度低、技术成熟的优势,是目前应用比较多的方案。
这是我们团队所提出的三模块陆空车辆技术方案,由飞行模块、功能舱体、地面模块构成,涉及到分布式电涵道推进等关键技术。

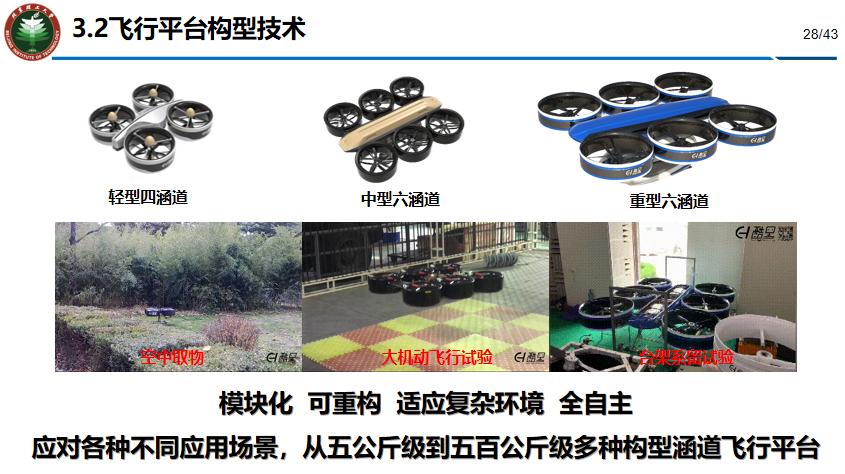
飞行平台构型技术方面,这是以分布式涵道飞行模块架构为基础研发的智能空中作业机器人,是一种新的装备。可以根据载荷不同,实现不同数量、不同大小的涵道设置,从而实现五公斤级到五百公斤级的并可以适应不同应用场景的多构型涵道飞行平台。


这是陆地平台的各种构型,特点模块化设计、通用化平台、功能化载荷。同一平台可以实现不同功能的载荷,不同的功能模块满足不同的使用需求。
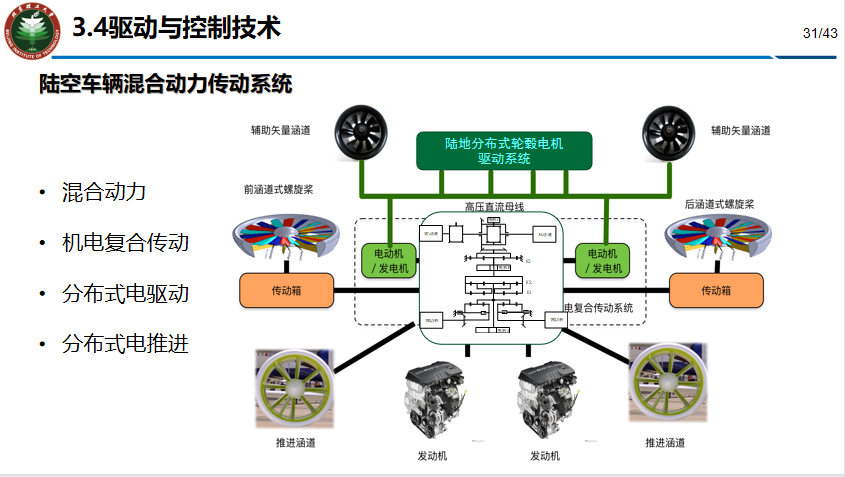
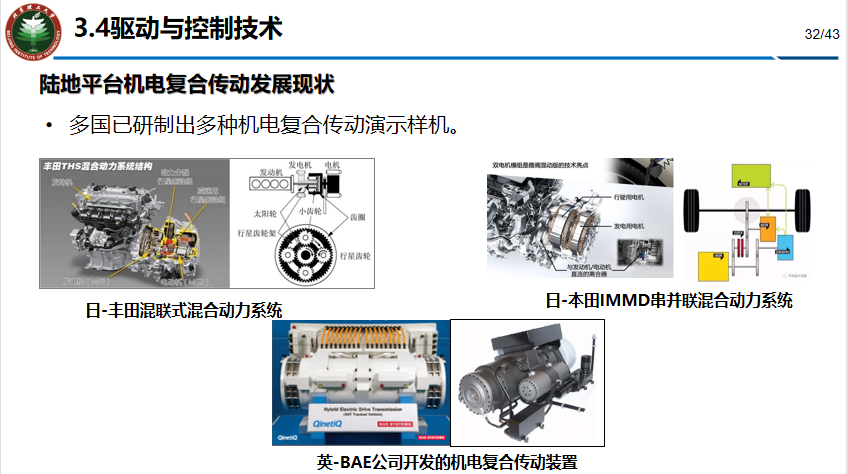
在驱动控制方面,未来电动化的发展趋势不可逆转,不管是采用轮毂电机的地面车辆、或是涵道式/旋翼式的飞行器,都将应用分布式电动、分布式电推进相关技术。
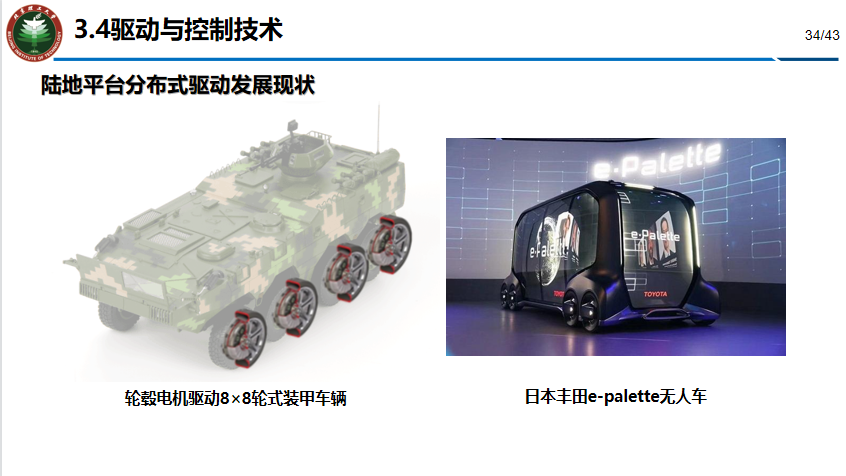
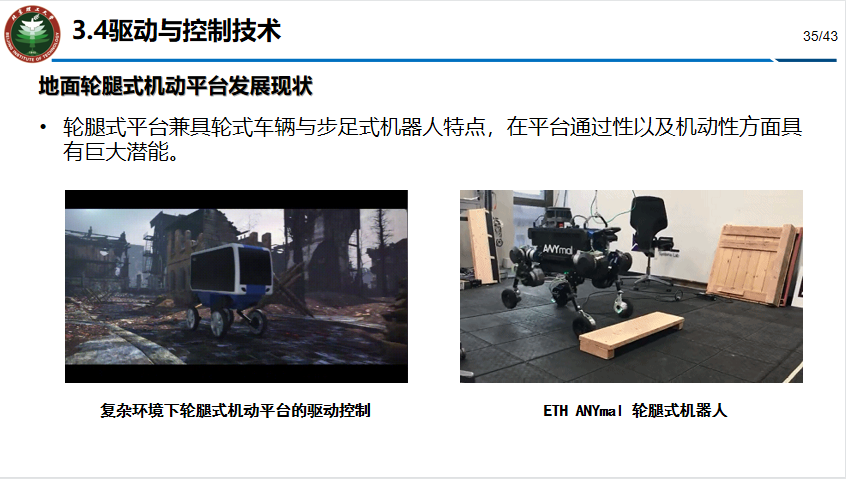

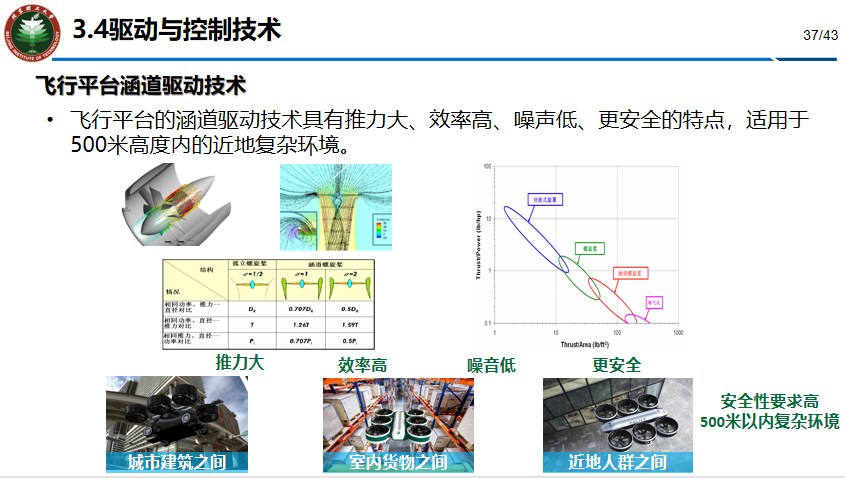
在轮式车辆分布式驱动领域,军用和民用领域都进行了很多研究。同时,也诞生了很多新的行走构型的研究,包括轮腿技术方案等等。在飞行平台的分布式驱动技术方案方面,飞行平台的涵道驱动技术具有推力大、效率高、噪声低、更安全的优势特点,适用于500米高度的近地复杂环境。我们团队也已经在涵道推进方面已经做了近十年的研究。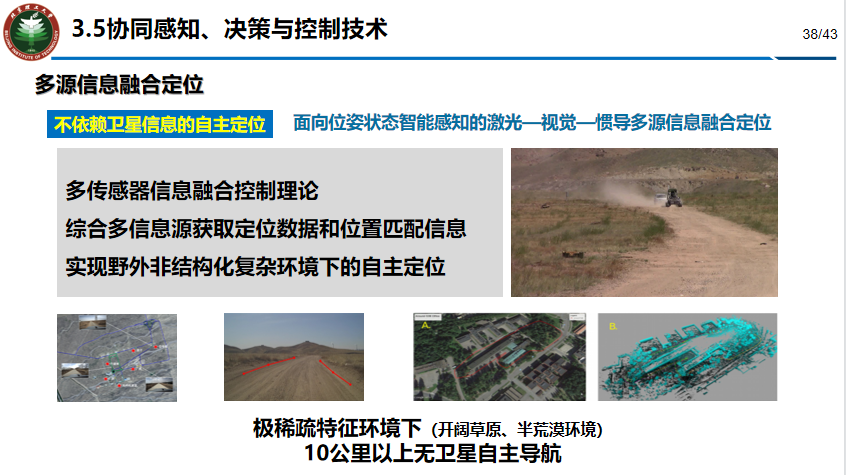
在协同感知、决策与控制技术领域,我们也开展了多方面研究工作。在多源信息融合定位方面,我们开展不依赖卫星信息的自主定位等研究,同时开展了车辆的道路实验。特别是在广阔的沙漠、草地上,道路特征不是很明显的地方,在特征极稀疏的环境下如何去识别环境,如何去融合多源传感器的信息来进行定位,这些都是亟待突破解决的难题。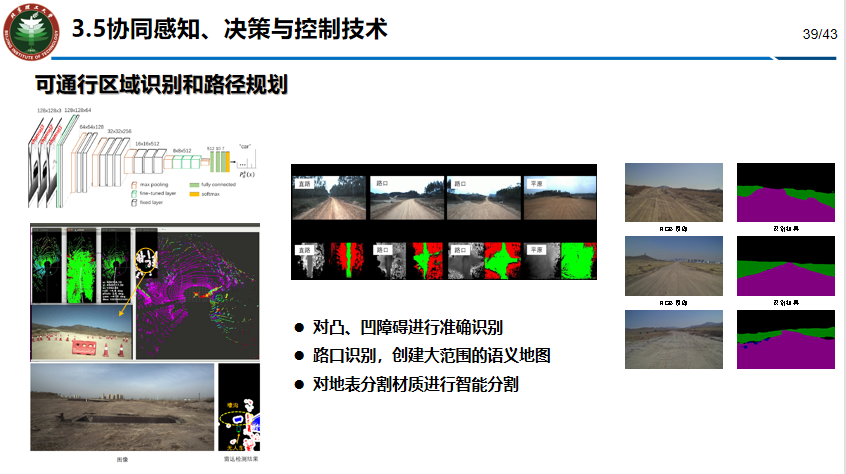
在可通行区域的规划方面,对军用车辆来讲,更多时候面对的是复杂道路、凹凸道路,没有明确的车道线、标志性特征的道路。那么,在这样的道路上,可通行的状况怎么去规划和识别,这些技术比乘用车更具有挑战性。在分布式协同决策与控制方面,我们突破了多项关键技术,在若干典型场景下开展了相关实验。综上来讲,我国陆空车辆领域正处在研究的起步阶段,还需要我们大家一起共同努力,服务于未来立体交通与陆军装备发展的重大需求。以上就是我给大家报告的内容,非常感谢大家的聆听。
